補助犬ロボット
写真をクリックすると詳しい説明に飛びます.



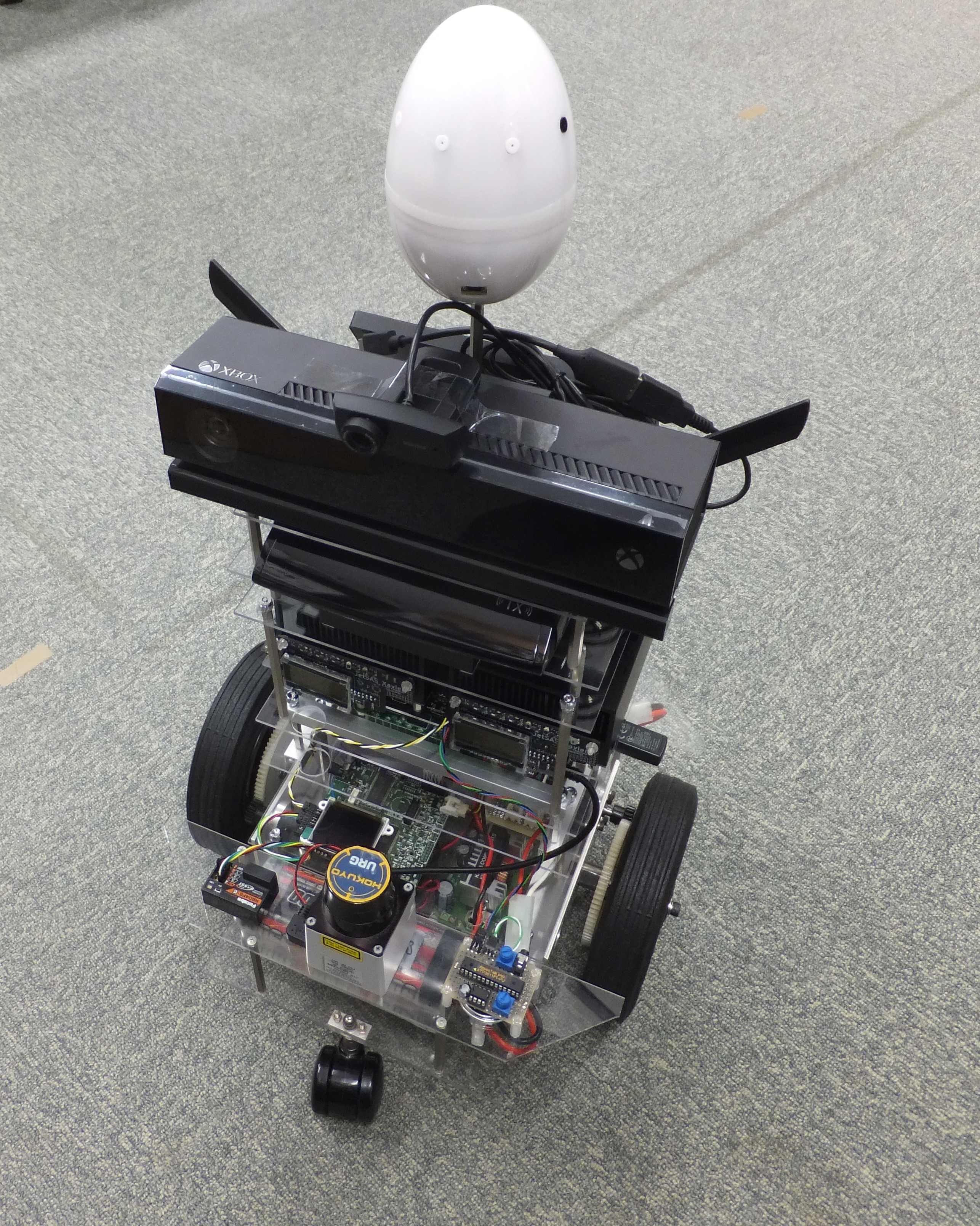
盲導犬や介助犬のように,人間をサポートするロボットを開発します.ロボットはセンサから得られる情報を頼りに,人や障害物など周りの環境を認識します.また,エッジAI用コンピュータを2台搭載しており,近年発展が著しいディープラーニングの研究成果をすぐに試すことができる環境が整っています.
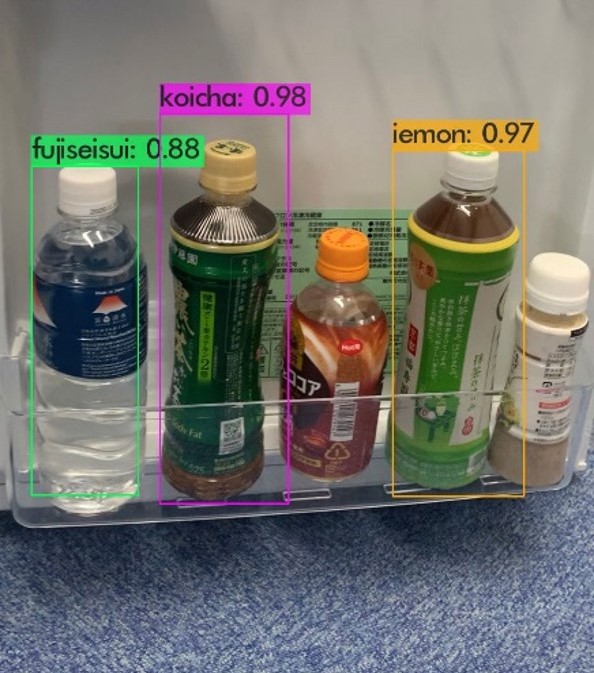
多くの情報を含む画像から,必要な情報のみを取り出し,利用する研究をしています.中澤研究室では,画像センサとしてweb cameraやKinectを使用しています.具体的には,ディープラーニングを用いた日用品の物体検出,移動ロボットの走行可能領域の識別についての研究を行っています.
複数のマイクロホンを用いることで,音声から環境情報を知ることができます. 音声認識・音源定位の機能を搭載し,音声によって操作できる移動ロボットを作りました.将来的には実際の補助犬のような複雑なタスクの達成を目指しています.
移動ロボットにとって自己位置の推定と環境地図の生成は重要な課題であり,それらを同時に行うSLAM (Simultaneous Localization And Mapping) は注目を集めています.SLAMを行うためにはセンサを通してロボットに周囲の環境を認識させる必要があり,センサの誤差への対処が重要になります.
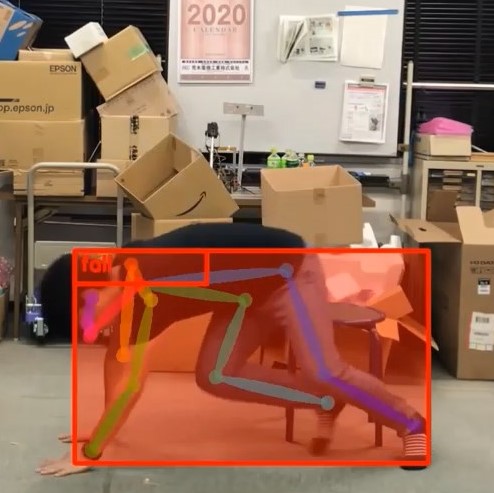
画像を用いて人間の行動を認識し,その認識結果に応じてロボットに行動を起こさせるための研究を行っています.見守りロボットを想定し,転倒などの危険行動を検知する研究例,補助犬の代替を目指してジェスチャーを認識させる研究例があります.

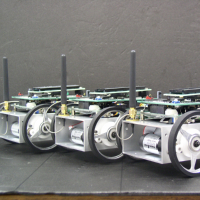
ロボット同士を協調させ,与えられた様々な課題を解決する研究をしています.複数のロボットを制御する方式には大きく分けて分散制御と集中制御があります.集中制御は全てのロボットの行動を上位のシステムが決定するのに対し,分散制御は各ロボットが現在の状況を把握して自分の行動を決定します.分散制御は,様々な課題に対応できる柔軟性や,一部のロボットが故障しても作業を続けられる耐故障性から近年注目を集めています.
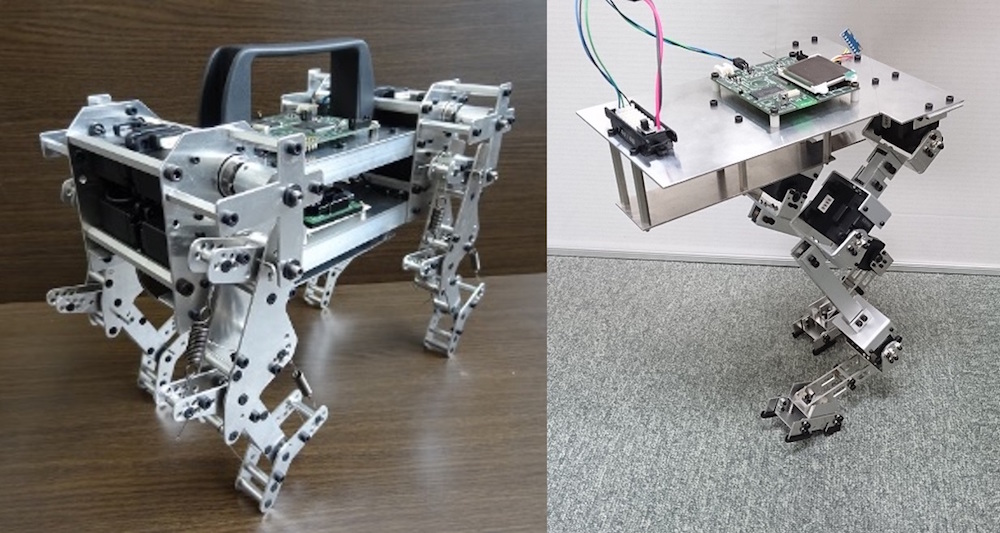
脚型ロボットは地面に対し脚先で不連続的に接地しながら移動を行うことから,車両型ロボットと比較して不整地環境下での移動において本質的に優れているとされ,実用化に向けて様々な研究が行われています.本研究室では現在,いわば“歩行のプロフェッショナル”である動物の運動生成や脚構造を規範としたロボットの開発を行っております.神経ネットワークによるリズム生成と体性感覚のフィードバックを利用した安定化制御や,筋肉や健がもつ粘弾性を脚機構にばねによって付加したロボットの研究を行っています.